Предыдущая статья — Играем в GTA V c Python. Часть III: прямой вход в игру.
Теперь, когда мы можем считывать фреймы и производить прямой ввод команд с клавиатуры, давайте вернемся к нашей основной задаче — беспилотному вождению автомобиля.
Начнем мы с определения полос движения для нашего транспортного средства. Мы можем использовать обнаружение полос движения как для создания автономного AI, который работает на основе простых правил, основанных на этих полосах, так и для обучения AI, который, как мы надеемся, впоследствии сможет обобщить этот опыт на большее количество сценариев.
Наш код на данный момент имеет следующий вид:
import numpy as np
from PIL import ImageGrab
import cv2
import time
from directkeys import ReleaseKey, PressKey, W, A, S, D
def process_img(original_image):
processed_img = cv2.cvtColor(original_image, cv2.COLOR_BGR2GRAY)
processed_img = cv2.Canny(processed_img, threshold1=200, threshold2=300)
return processed_img
def main():
for i in list(range(4))[::-1]:
print(i+1)
time.sleep(1)
last_time = time.time()
while(True):
screen = np.array(ImageGrab.grab(bbox=(0,40, 800, 640)))
new_screen = process_img(screen)
print('Loop took {} seconds'.format(time.time()-last_time))
last_time = time.time()
cv2.imshow('window', new_screen)
#cv2.imshow('window2', cv2.cvtColor(screen, cv2.COLOR_BGR2RGB))
if cv2.waitKey(25) & 0xFF == ord('q'):
cv2.destroyAllWindows()
break
def process_img(original_image):
processed_img = cv2.cvtColor(original_image, cv2.COLOR_BGR2GRAY)
processed_img = cv2.Canny(processed_img, threshold1=200, threshold2=300)
vertices = np.array([[10,500],[10,300],[300,200],[500,200],[800,300],[800,500],
], np.int32)
processed_img = roi(processed_img, [vertices])
return processed_img
from IPython.display import Image Image(filename='idea-of-roi.png')
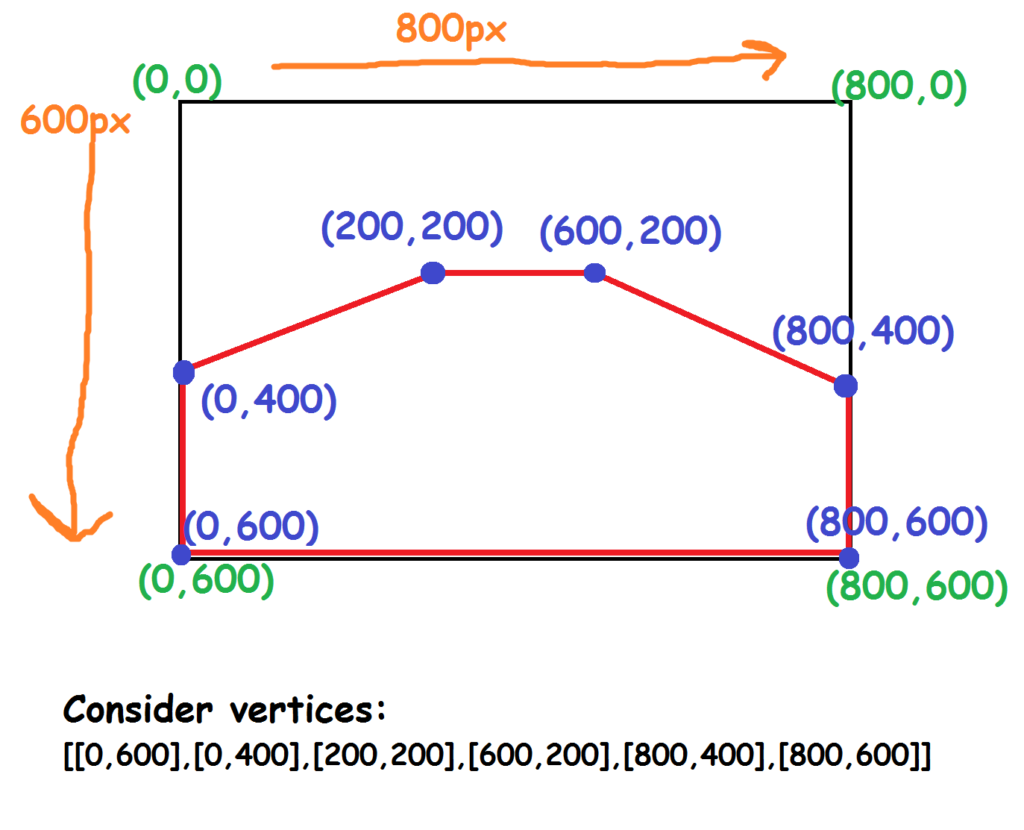
На картинке выше приведено схематичное изображение местности, которое мы будем использовать в качестве полигона для нашего автомобиля. Теперь, разумеется, нам нужно написать roi-функцию. ROI (Region of interest — интересующая нас местность).
def roi(img, vertices):
#blank mask:
mask = np.zeros_like(img)
# fill the mask
cv2.fillPoly(mask, vertices, 255)
# now only show the area that is the mask
masked = cv2.bitwise_and(img, mask)
return masked
def main():
last_time = time.time()
while(True):
screen = np.array(ImageGrab.grab(bbox=(0,40, 800, 640)))
new_screen = process_img(screen)
print('Loop took {} seconds'.format(time.time()-last_time))
last_time = time.time()
cv2.imshow('window', new_screen)
#cv2.imshow('window2', cv2.cvtColor(screen, cv2.COLOR_BGR2RGB))
if cv2.waitKey(25) & 0xFF == ord('q'):
cv2.destroyAllWindows()
break
Image(filename='roi-and-edge.jpg')

Как вы можете заметить из этого изображения, мы не определили столбы вдоль дороги и провода на них. Также, хотя мы и определили края дороги, дорожная разметка осталась нераспознанной.
Следующая статья — Играем в GTA V c Python. Часть V: алгоритм Хафа.