Предыдущая статья — Играем в GTA V c Python. Часть IV: поиск дорожной разметки.
В данной статье мы собираемся для поиска линий включить в наш код алгоритм Хафа из библиотеки OpenCV. Наш код на данный момент имеет следующий вид:
import time
from directkeys import ReleaseKey, PressKey, W, A, S, D
import pyautogui
def roi(img, vertices):
mask = np.zeros_like(img)
cv2.fillPoly(mask, vertices, 255)
masked = cv2.bitwise_and(img, mask)
return masked
def process_img(original_image):
processed_img = cv2.cvtColor(original_image, cv2.COLOR_BGR2GRAY)
processed_img = cv2.Canny(processed_img, threshold1=200, threshold2=300)
vertices = np.array([[10,500],[10,300], [300,200], [500,200], [800,300], [800,500]], np.int32)
processed_img = roi(processed_img, [vertices])
return processed_img
def main():
last_time = time.time()
while(True):
screen = np.array(ImageGrab.grab(bbox=(0,40, 800, 640)))
new_screen = process_img(screen)
print('Loop took {} seconds'.format(time.time()-last_time))
last_time = time.time()
cv2.imshow('window', new_screen)
#cv2.imshow('window2', cv2.cvtColor(screen, cv2.COLOR_BGR2RGB))
if cv2.waitKey(25) & 0xFF == ord('q'):
cv2.destroyAllWindows()
break
Далее мы собираемся использовать алгоритм HoughLinesP из библиотеки OpenCV, который находит линии на основе нескольких параметров. Мы добавим его в нашу функцию образа:
def process_img(original_image):
processed_img = cv2.cvtColor(original_image, cv2.COLOR_BGR2GRAY)
processed_img = cv2.Canny(processed_img, threshold1=200, threshold2=300)
vertices = np.array([[10,500],[10,300],[300,200],[500,200],[800,300],[800,500],
], np.int32)
processed_img = roi(processed_img, [vertices])
# more info: http://docs.opencv.org/3.0-beta/doc/py_tutorials/py_imgproc/py_houghlines/py_houghlines.html
# edges rho theta thresh # min length, max gap:
lines = cv2.HoughLinesP(processed_img, 1, np.pi/180, 180, 20, 15)
draw_lines(processed_img,lines)
return processed_img
У нас пока еще нет функции «draw_lines» (отрисовка линий), давайте исправим это:
def draw_lines(img,lines):
for line in lines:
coords = line[0]
cv2.line(img, (coords[0], coords[1]), (coords[2], coords[3]), [255,255,255], 3)
Все достаточно просто, эта функция просто рисует линии несколько толще там, где кажется, что они должны бы быть. Полный код к этому моменту имеет следующий вид:
import numpy as np
from PIL import ImageGrab
import cv2
import time
from directkeys import ReleaseKey, PressKey, W, A, S, D
def draw_lines(img,lines):
for line in lines:
coords = line[0]
cv2.line(img, (coords[0], coords[1]), (coords[2], coords[3]), [255,255,255], 3)
def process_img(original_image):
processed_img = cv2.cvtColor(original_image, cv2.COLOR_BGR2GRAY)
processed_img = cv2.Canny(processed_img, threshold1=200, threshold2=300)
vertices = np.array([[10,500],[10,300],[300,200],[500,200],[800,300],[800,500],
], np.int32)
processed_img = roi(processed_img, [vertices])
# more info: http://docs.opencv.org/3.0-beta/doc/py_tutorials/py_imgproc/py_houghlines/py_houghlines.html
# edges rho theta thresh # min length, max gap:
lines = cv2.HoughLinesP(processed_img, 1, np.pi/180, 180, 20, 15)
draw_lines(processed_img,lines)
return processed_img
def roi(img, vertices):
#blank mask:
mask = np.zeros_like(img)
# fill the mask
cv2.fillPoly(mask, vertices, 255)
# now only show the area that is the mask
masked = cv2.bitwise_and(img, mask)
return masked
def main():
last_time = time.time()
while(True):
screen = np.array(ImageGrab.grab(bbox=(0,40, 800, 640)))
new_screen = process_img(screen)
print('Loop took {} seconds'.format(time.time()-last_time))
last_time = time.time()
cv2.imshow('window', new_screen)
#cv2.imshow('window2', cv2.cvtColor(screen, cv2.COLOR_BGR2RGB))
if cv2.waitKey(25) & 0xFF == ord('q'):
cv2.destroyAllWindows()
break
Запустив его, мы получим то-то вроде этого:
Image(filename='lines-detected.png')
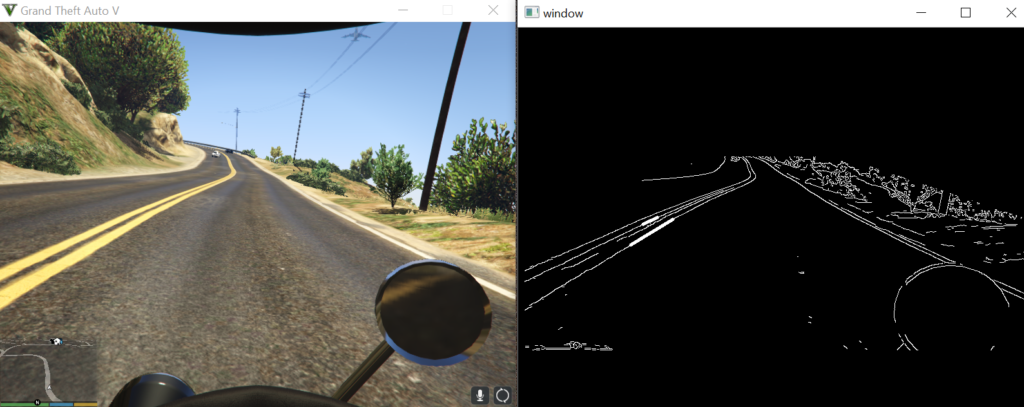
Хмм, так себе линии, если честно. Это происходит из-за разного рода помех. Давайте сгладим наше изображение и поищем линии заново. Для этого будем использовать фильтр Гаусса cv2.GaussianBlur:
def process_img(original_image):
processed_img = cv2.cvtColor(original_image, cv2.COLOR_BGR2GRAY)
processed_img = cv2.Canny(processed_img, threshold1=200, threshold2=300)
vertices = np.array([[10,500],[10,300],[300,200],[500,200],[800,300],[800,500],
], np.int32)
processed_img = cv2.GaussianBlur(processed_img,(5,5),0)
processed_img = roi(processed_img, [vertices])
# more info: http://docs.opencv.org/3.0-beta/doc/py_tutorials/py_imgproc/py_houghlines/py_houghlines.html
# edges rho theta thresh # min length, max gap:
lines = cv2.HoughLinesP(processed_img, 1, np.pi/180, 180, 20, 15)
draw_lines(processed_img,lines)
return processed_img
Image(filename='blurred-and-lines-detected.jpg')

Итак, мы сделали это! Самые длинные и наиболее доминантные линии это определенно линии дорожной разметки.
Следующая статья — Играем в GTA V c Python. Часть VI: определяем линии разметки для нашего беспилотного автомобиля.